

For those with limited mobility, be it due to age, injuries, or disabilities, walking is a continuous, conscious effort.
Falling is the #1 cause of death for people over 65. Despite falls often indicating the start of a functional decline, leading to painful surgeries, loss of independence, and a toll on mental health, they are often preventable accidents. However, most mobility aid devices only utilize their static design in trying to prevent such accidents.
We propose to develop a new type of walker equipped with features such as perception and actuation to implement a pose correction algorithm with the aim of improving stability and usability. Our goal is to develop an actuated, robotic walker with the capability of performing real-time gait and pose detection of the user, as well as using that data to actively guide the user to a safer and more stable walk.
“just walk”
We want our user to "just walk" while the walker adjusts itself to keep the user safe and stable.
Our actuated walker is designed to make walker use easier by reducing the amount of attention needed to safely use the walker, as well as implementing additional safety features. Not only that, it can be used like a regular old walker when powered off.
Features
Lower Body Gait Analysis
Our suite of sensors track the lower body of the user, such as ankle, knee, and hip positions, and localize them in relation to the walker in 3D space. These data are used in our safety algorithms.
User Pose Correction
The above gait analysis is used in a user pose correction algorithm to make sure the user’s body is in a safe operating location (not too far from the walker, wide enough steps, etc). Usually, a user needs to consciously adjust the distance between themselves and the walker, and research show that considerable attention is required even for long-time users of walkers. Our algorithm allows a user to just walk while holding onto their walker, and the walker will adjust its braking to keep the user safe and stable.

Incline Support
Our walker’s suite of sensors allow it to detect if it is going uphill or downhill. In those cases, the walker’s can either compensate for the walker’s weight uphill or provide automatic braking going downhill.

Drive Mode / Walk-to-Sit
With powerful motors and our integrated sensors, our platform allows users to drive their walker around by pushing/pulling on the handles. In addition, during walk-to-sit and sit-to-walk, the walker brakes automatically, making it safer for the users.

Activity Tracking / Physician-Set Limits
Our walker can be programmed to give a detailed activity report of the walker users to their physicians, including their use habits and walking gait analysis. In addition, users could be given limitations such as max walking time / distance, or be customized requirements such as enforced step lengths.
Hardware Prototypes
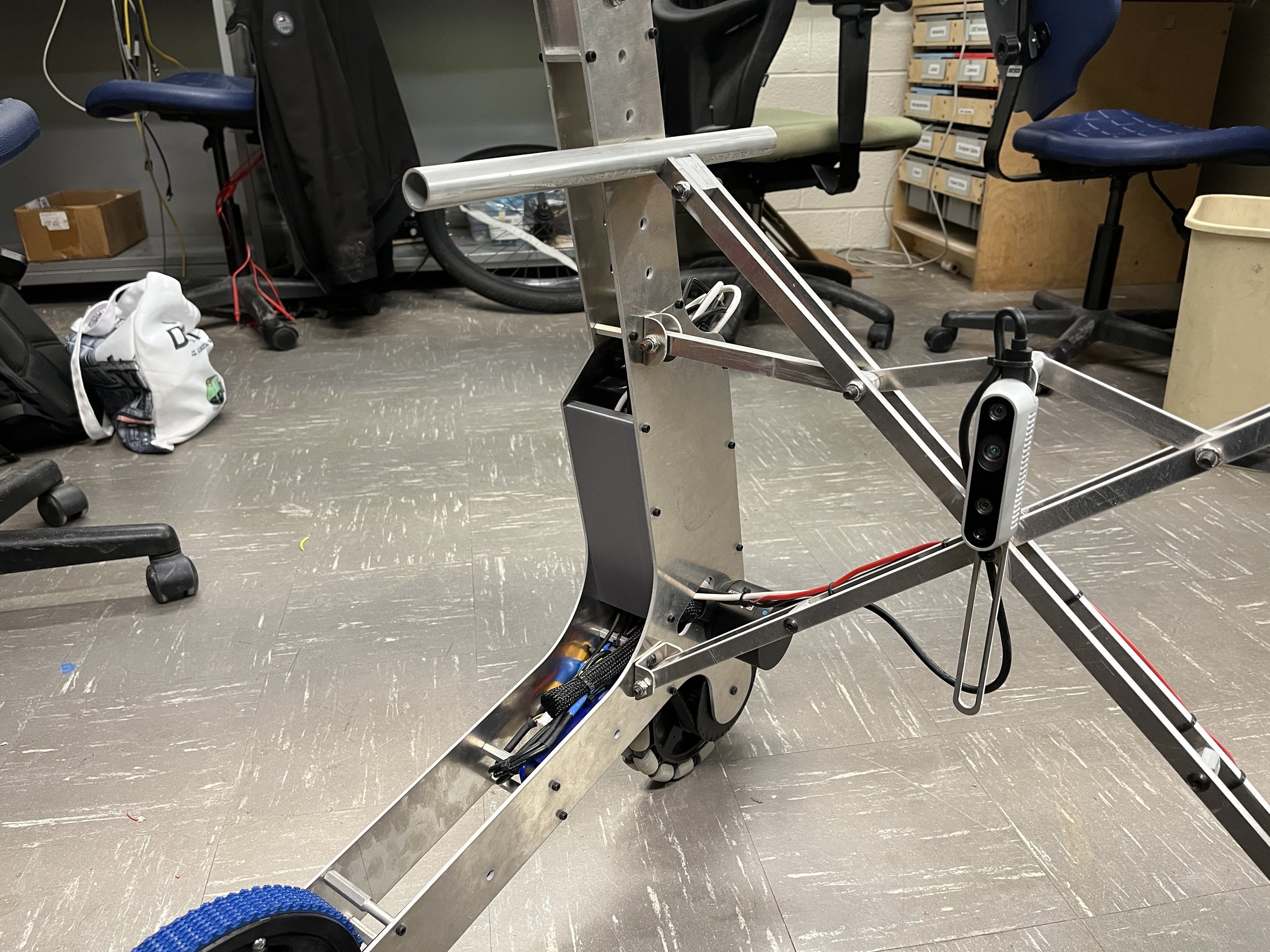
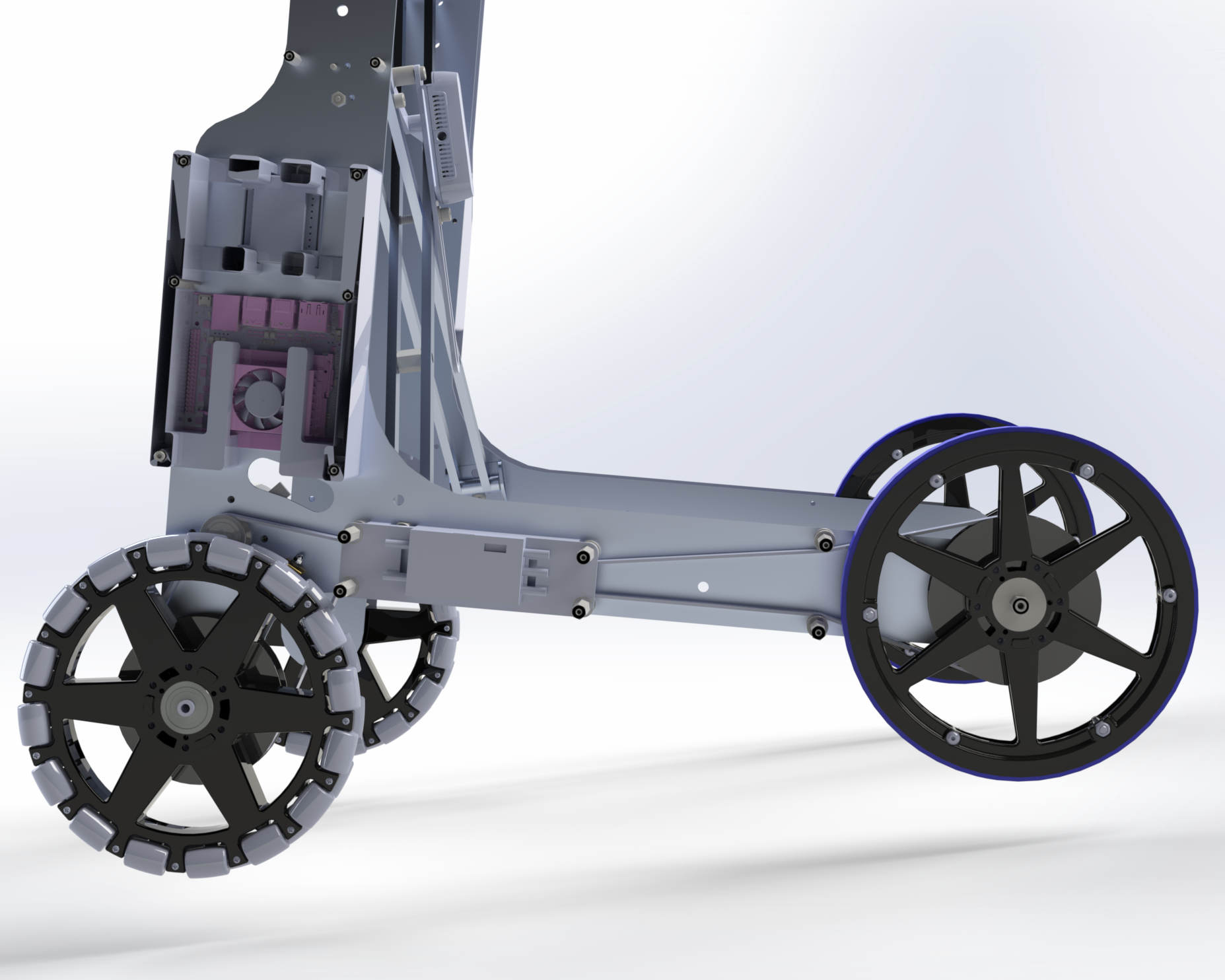
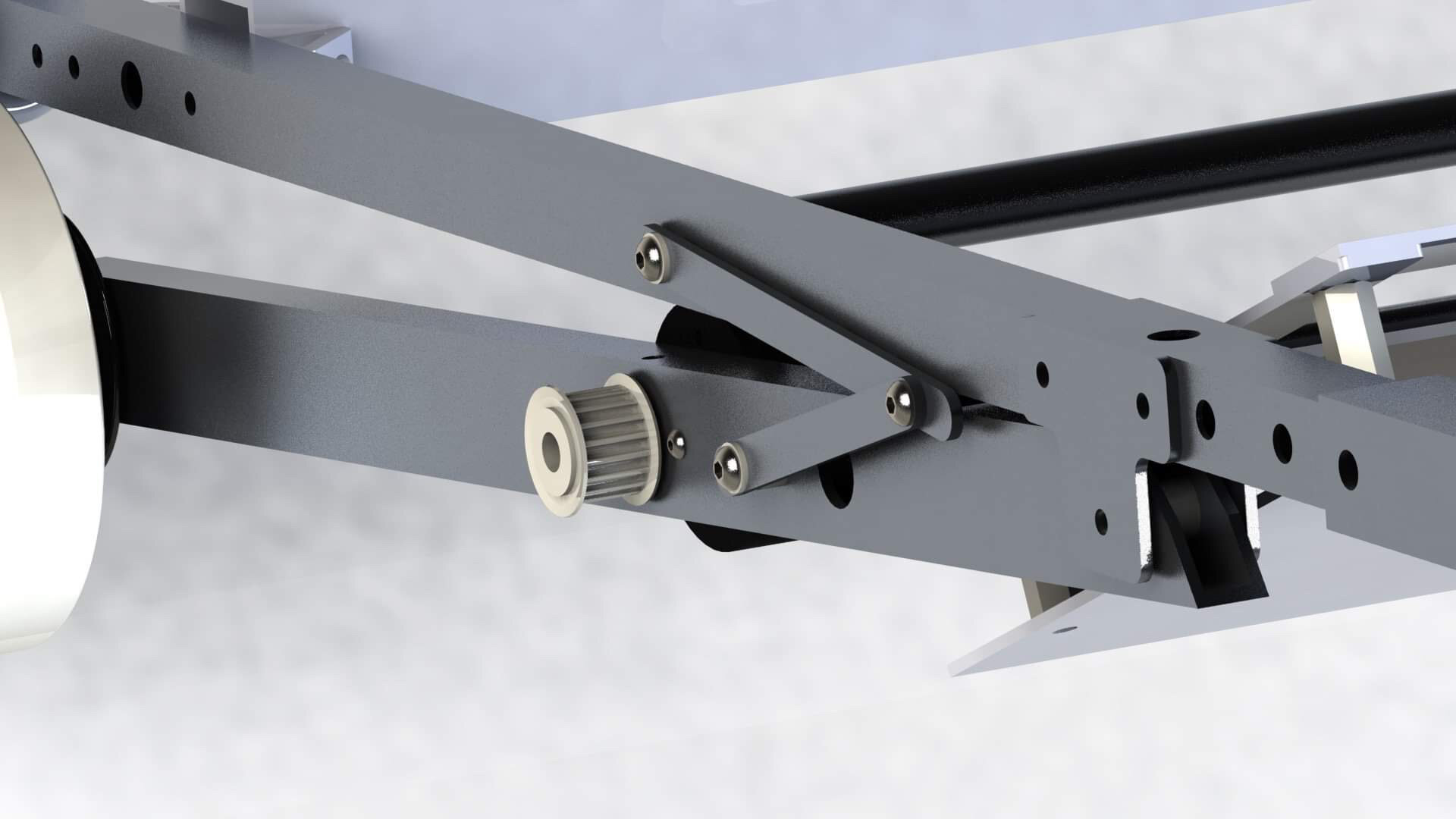
Full Size Prototype - Mark IV
Our fourth prototype switched to a vertical fold design with a four wheel drive control system, allowing better control / braking of the walker, as well as providing a much wider field of view for our sensor system. It also moves all the electronics into the chassis and out of the seating area.






Full Size Prototype - Mark III
Our third prototype integrated an inline braking system, which allowed both the user and a servo motor to control a disk brake. It also integrated the batteries into the chassis, reducing the size and bulk of the seating area. An angled front leg reduced its turn radius.






Full Size Prototype - Mark II
Our second prototype was designed to integrate more sensors into our chassis, and fit the size factor of a regular walker more closely.








Full Size Prototype - Mark I
This was out first full size prototype. This was used to validate our approach of using motors as a braking system.







Market Analysis
With a 27% likelihood for a senior citizen to experience at least one fall per year, and 33% of walker fall patients requiring hospitalization, we can estimate 820,000 walker users that would be hospitalized. If an actuated walker can prevent 20% of falls due to walkers, it can keep 164,000 senior citizens from being hospitalized. With the average cost of hospitalization being $35,000, 5.7 billion dollars of medical costs could be saved annually as a result, which translates to $620 of savings per year per walker user. Assuming a 10 year lifespan for the walker (possibly spanning multiple users), the savings will be $6200 per actuated walker purchase. If the actuated walker prevents just 5% of falls, the savings will still be $1550 per actuated walker purchase. With a regular walker costing around $100, the calculation above shows that it makes economical sense for insurance companies or users to purchase a $1600 actuated walker if it reduces falls by at least 5%.
In addition, preventing falls has an effect of preventing future falls, as previous fall patients are 2.55 times more likely to fall again. This is partially due to falling being a marker for reduced physical ability, but also due to injuries suffered during the initial fall that increases future fall likelihood. Considering this combined with walker users’ higher likelihood of experiencing a fall than non-users, our estimate for cost savings is very conservative.
Team
Engineering & Development Team
Jung Yeop (Steve) Kim – Hardware Systems
McKenna Cisler – Software Systems
Hannah Dunnigan – Machining and Design
Seojin Jang (KHU) – Software Systems
Matthew Berg – Software Systems
Howon Lee – Manufacturing and Testing
Public Health Team
Natalie Davoodi – User Testing Coordinator
Olivia McKnight – Walker Safety Metric / Feature Design
Athena Feng – Stakeholder Analysis / Feature Design
Project Advisors
George Konidaris, Stefanie Tellex – Faculty Advisors (Computer Science)
Stefan Gravenstein, Rosa Baier, Linda Resnik – Faculty Advisors (Public Health)
Contact
Please email {kimjungyeop} @ brown.edu.