it's a cute, two-wheeled maze solving robot.
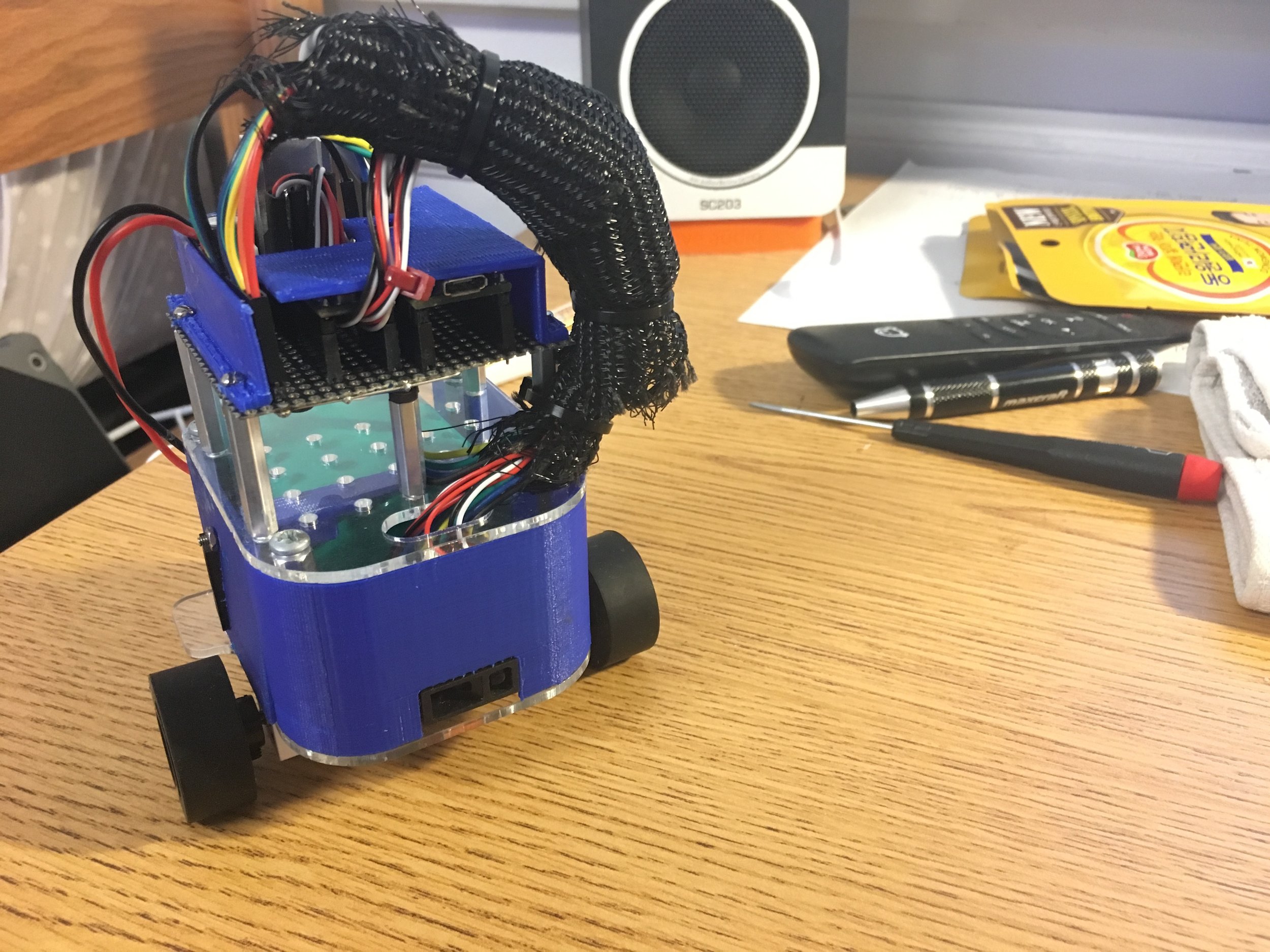




Below are the PowerPoint slides used for the judging session at the Brown IEEE Robotics Olympiad. Our team got 3rd place, the only rookie team to be awarded a prize.
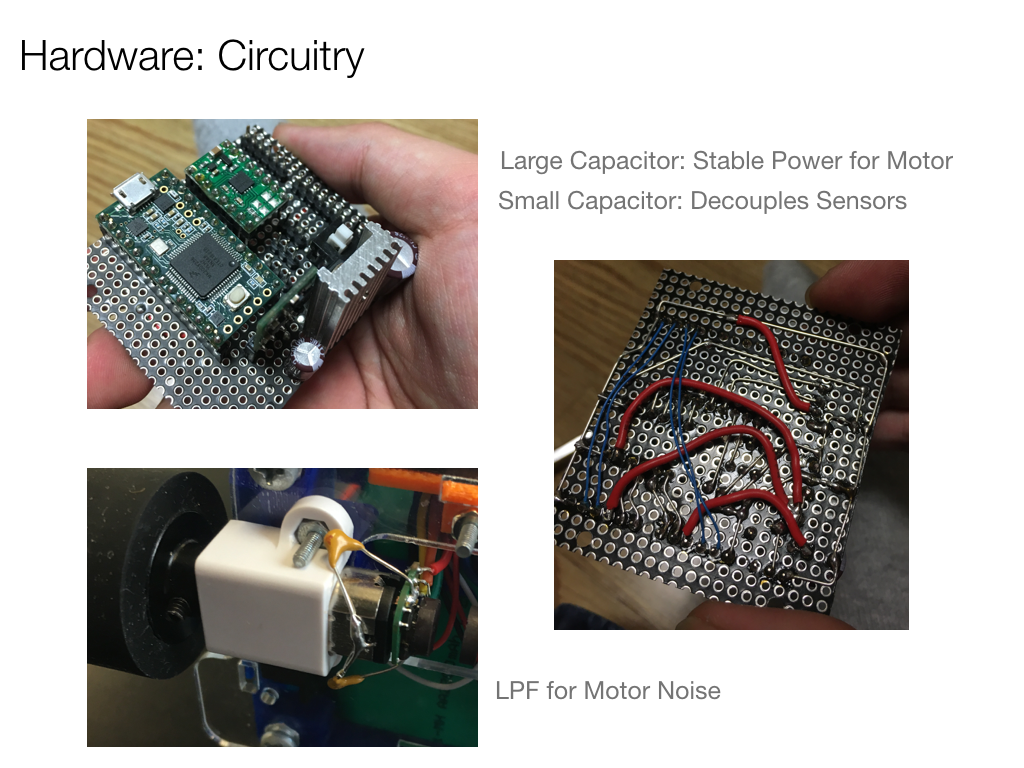
I took part in iterating the CAD design, manufacturing and assembly, circuitry, as well as the backend code on motor PID velocity / position control as well as an IMU-based rotation PID control.