
...a little bit of prequel
When I first got on board the TableBot project, we had a very crude model of TableBot; it was a projector, netbook, and a PlayStation camera put together on a TurtleBot 2 base. It showed us what a moving projector could look like, and had a very pretty cylindrical outside shell, but it had one giant flaw; the projector and the camera would be pointing at the same direction. In short, the camera angle / position could not be altered since the projector needs a flat wall to project on; the person would have to move to be caught on camera.



So, the idea for the next prototype was to get the camera moving. It would preferably move in a circle so that after the projector finds a wall to project on, the camera would swing to find the person to film. I set a few rules I wanted to keep to while designing the ‘swingable’ camera:
- the mechanism for rotating the camera must be hidden inside; thus, closer to the center of the robot than the camera,
- it needs to make a full turn in around 2 seconds,
- the camera should provide an unobstructed 360 degree view around it.
a rotating tabletop
Here, I arrived at the conclusion that it would be best to rotate the entire section of the robot where the camera is on, instead of making only the camera rotate. Below are the reasons why:
- It would be a simpler design for the outer shell if it only needs one hole that would rotate with the camera.
- If the camera was the only thing rotating the supports for the tabletop would obstruct the view of the camera.
After experimenting with the idea of using internal spur gears or high friction wheels and a turntable, I decided to use a timing belt and a pulley, after getting some inspiration from Professor Taubin’s 3D Scanner setup. Below are the first designs for a rotating tabletop:
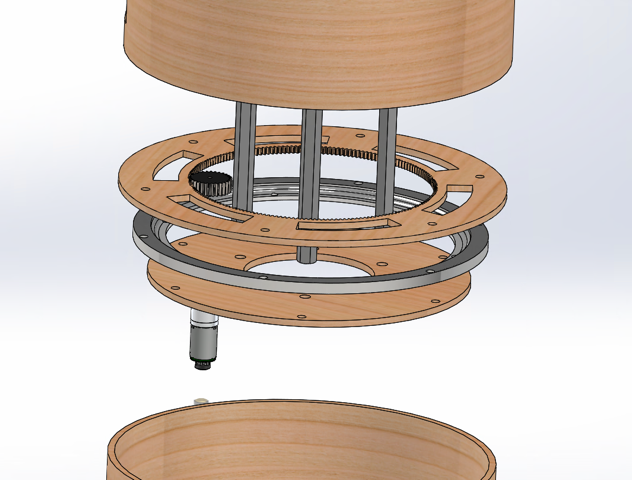
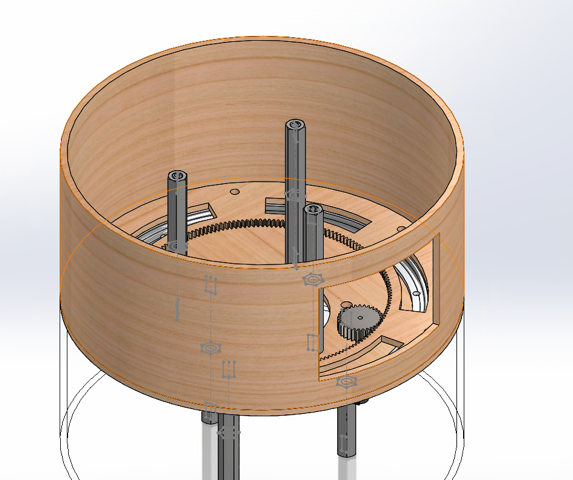

and below is the design for the first working rotating tabletop.
The one great benefit of this design is that force that the motor turning the tabletop need to exercise is almost independent of the weight the tabletop is subject to. The design concerning weight dissipation would continue to be improved in future iteration through using Male-Female standoff posts, which I will talk about later, but the design of the rotating tabletop was one of the first steps towards a fully functional Mark 1 model for the TableBot.
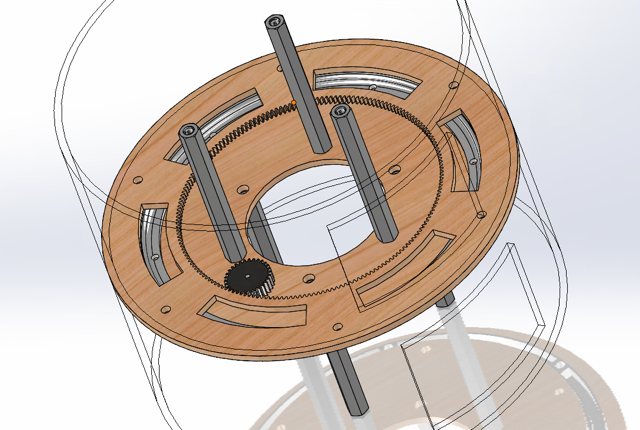
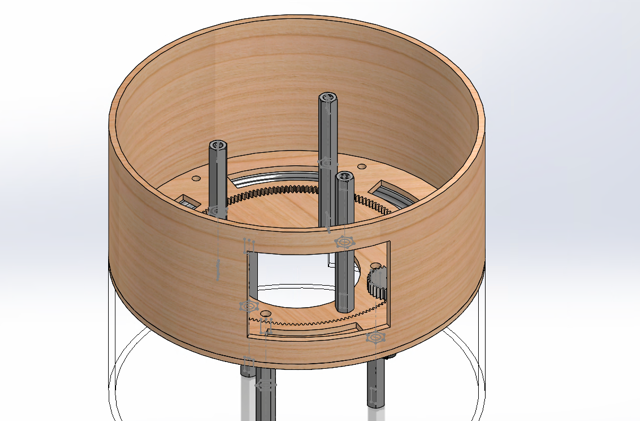
Below is the first design for a TableBot that uses the rotating tabletop.











And below is what the rotating tabletop went on to be.